Robot Autonome à détection d'obstacle
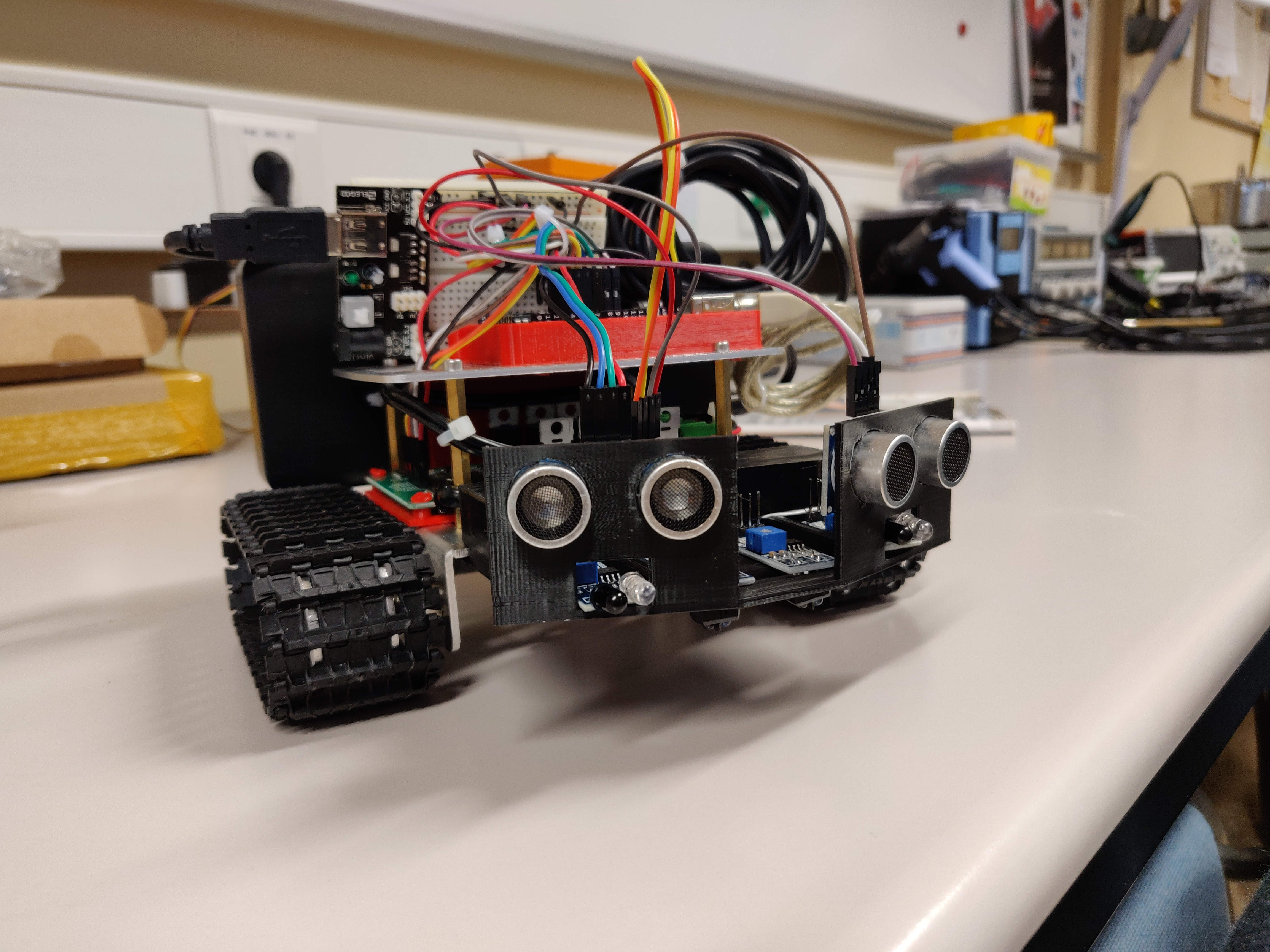
Ce robot autonome a pour objectif de traverser une arène en évitant des obstacles simple tels que des boites en cartons. Pour ce faire, celui-ci dispose de 2 capteurs de proximité à ultrasons. Suite à des soucis d'orientation liés à l'évitement des obstacles, j'y ai rajouté un magnétomètre ainsi que 2 capteurs de proximités infrarouges. Ceux-ci n'apparaissent pas encore dans le code, mais y seront prochainement.
Le magnétomètre communique avec l'arduino via une liaison i2c et aidera le robot à garder son cap durant la traversée. Les capteurs de proximité infrarouge quant à eux ne sont là que pour palier au problème de mesure des capteurs à ultrason en dessous de 15cm.
Voici une démonstration du fonctionnement du robot.